Robot Arm
Built this during a period where I needed to shut my brain off. Turns out building a robot arm does exactly that.
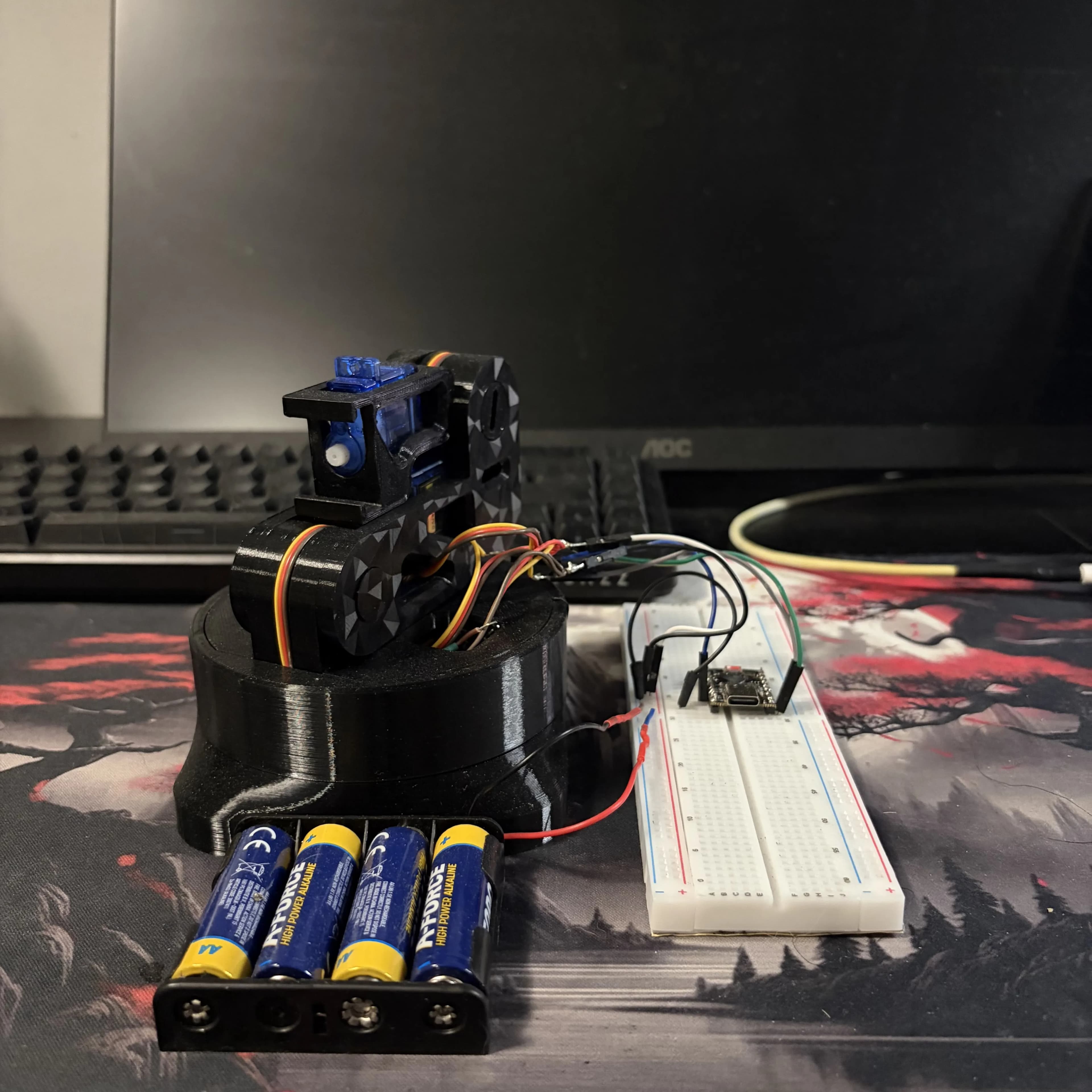
A fully self-built multi-axis robot arm. I designed and assembled the mechanical structure, wired up the servo motors, and wrote the motion control software that drives the arm's movements with smooth interpolation between positions.
The arm is controlled via a custom-built one-handed controller (see project 6), which receives position commands and coordinates all joints simultaneously. The motion algorithms ensure smooth, predictable movement without mechanical stress.
This project combines structural engineering, electronics, and software into one physical system — a clear demonstration of end-to-end hardware-software integration.